-
.填空题
-
水下机器人通信包括以 、 、 、 和 等,主要用于水下机器人与 之间、水下机器人与 之间通信,实现信息的双向传输。正确答案:太网通信|光纤通信|水声通信 |无线电通信|卫星通信|水下机器人|其他平台答题解析:无
-
现场控制单元的硬件配置需要完成 、 、 。现场控制单元的软件系统主要包括以实时数据库为中心的 、 、 等软件模块。正确答案:插件配置|硬件冗余配置 |硬件安装|数据巡检|控制算法|控制输出答题解析:无
-
推进系统是AUVs的重要组成部分,主要包括 、 、 、 等。正确答案:电机 | 驱动器|传送装置|螺旋桨答题解析:无
-
自主水下机器人使用的密封结构主要是静密封,最便捷有效的方式是 密封。按照沟槽形式,可将密封结构分为 和 。正确答案:O形密 封圈 |轴向密封 |径向密封答题解析:无
-
自主水下机器人的线型是决定其阻力、 的主要因素。自主水下机器人的线型主要采用 外形以及 外形,其中 外形应用广泛。正确答案:操纵性 |回转体 |非回转体|回转体答题解析:无
-
没有一种全功能的机器人能完成所有的任务,所以需要依据任务和工作需求,结合使用条件进行总体布局设计,对自主水下机器人的总体结构、 、 、控制与通信方式进行优化,提高有限空间的利用效率。正确答案:流体性能|动力系统答题解析:无
-
按照完成使命的主要功能划分,水下机器人主要包括 和 两大部分。水下机器人的总体技术指标主要包括尺度、 、航行 、航行速度、 以及 的性能指标等。正确答案:水下机器人本体|水面支持系统|质量|深度|续航能力|任务载荷答题解析:无
-
水下机器人根据是否载人,可以分为 和 两大类。而UUVs由于没有载人的限制,更适合长时间、大范围和大深度的水下作业。UUVs按照与水面支持系统间联系方式的不同可以分为 和 两大类。正确答案:载人潜水器(human occupied vehicles, HOVs) |无人水下机器人(unmanned underwater vehicles, UUVs)|有缆水下机器人|无缆水下机器人答题解析:无
-
-
.简答题
-
请分析水下机器人载体结构腐蚀有哪几种?造成的原因有哪些?防腐蚀的方法有哪些?正确答案:
水下机器人载体结构腐蚀注意分为四种:
1)化学腐蚀; 2)电偶腐蚀; 3)点解腐蚀; 4)微生物腐蚀
造成自主水下机器人载体结构常见腐蚀原因分析:
1)不同金属之间的电偶腐蚀,尤其是不同金属之间直接接触导致的电偶腐蚀。
2)金属材料自身缺陷、生产的零件本身存在瑕疵活存储时认为磕碰导致零件表面形成点蚀。
3)零件结构设计不合理、寒风存在缺陷导致零件形成缝隙腐蚀。
自主水下机器人载体结构防腐蚀方法:
1)抑制电偶腐蚀的方法;2)抑制点蚀的方法;3)抑制缝隙腐蚀的方法;4)合理设计并安装牺牲阳极;5)防腐涂层法
答题解析:无 -
请分析下图中吸排水、吸排油两种方案的浮力调节系统原理正确答案:
1、吸排水浮力调节系统
吸排水浮力调节系统通过吸排海水来实现剩余浮力的变化。具体来说,就是利用高压液压系统来推动液压缸做往复运动,通过与液压缸串联的海水缸活塞位置变化进而实现吸排海水,改变AUVS剩余浮力大小。
2、吸排油浮力调节系统
吸排油浮力调节系统的原理是:当需要增大浮力时,齿轮泵经过单向阀由内油箱向外油囊注油;当需要减小浮力且水深较浅时,阀块2电磁阀开,齿轮泵经过电磁阀由外油囊向内油箱注油;当需要减小浮力且水深较大时,阀块1电磁阀开,外油囊在外部水压下直接向内油箱注油,此时齿轮泵不工作,避免吸油口压力过大对泵造成损害。内油箱采用活塞缸,通过检测活塞位置来测量调节量。为克服活塞移动时动密封的摩擦力,对整个浮力调节段充0.15MPa压力,避免当齿轮泵从内油箱吸油时吸油口产生负压。
答题解析:无 -
请分析下图中的水下机器人是哪种结构形式,各有哪些优缺点?正确答案:
(1). 鱼雷型整体耐压舱结构
优点:
①由于各个舱段之间采用标准接口,整个自主水下机器人更便于实现重构。例如,根据使命的需要可以增加 一个附加的能源段来提高续航能力、更换不同的载荷舱段等。
②由于采用全耐压结构,鱼雷型整体耐压舱结构的自主水下机器人具有容积效率高等特点,且 所有设备都布置于干式密封舱内,设备之间的电气连接更为便捷。
③采用鱼 雷型整体耐压舱结构的自主水下机器人可以利用鱼雷制造积累的技术、标准、生 产工艺,对于降低生产成本、提高产品质量有一定帮助。
缺点:
整体耐压舱的主要局限性是其工作深度通常较小,这是因为,随着工作深度的增大,大直径整体耐压舱壳体壁厚相 应增加,会导致无法提供整个潜水器所需的正浮力。从国内外自主水下机器人现状来看,通常工作水深超过1000m的潜水器不采用整体耐压舱结构。
(2) 透水式框架结构
优点:
①容易实现较大工作水深。因为设备采用独立耐压舱密封,耐压舱尺寸较小,相应的耐压壳体厚度较小,更容易控制质量、降低成本。
②潜水器维护方便。与鱼雷型整体耐压舱结构自主水下机器人相比,透水式框架结构自主水下机器人设备均安装于独立的耐压舱或框架上,只需拆开浮 力材料或导流罩就可以对设备进行维护,需要的辅助支持设备较少,降低了维护 保障的难度。
③潜水器配置灵活。鱼雷型整体耐压舱结构自主水下机器人虽然更容易 实现模块化和载荷重构,但对已有的模块进行更改、调整并不方便,尤其需要对 壳体进行变动时,代价很高。透水式框架结构自主水下机器人设备之间相对独立, 局部进行更改、变动时相互影响较小,进行局部配置变动时更为灵活。
缺点:
其设备选型要求更高,需具有独立耐压、密封能力,若没有独立耐压、密封能力,则需要增加耐压舱进行封装。 此外,设备之间必须通过具有水密性能的线缆连接,增加了使用的难度而成本。
(3)整体耐压舱和透水式框架复合结构
优点:
整体耐压舱和透水式框架复合结构自主水下机器人一方面具有容积率较高、 重构性好的特点,另一方面具有工作深度大、配置灵活的优点。
缺点:
当工作深度较大时,整体耐压舱所需的材料以及制造是一项不小的挑战。
答题解析:无 -
路径规划技术种环境建模方法常用的方法有哪些?其中栅格法的优缺点是什么?正确答案:
路径规划技术种环境建模方法常用的方法:可视图法,自由空间法,栅格法
栅格法的优点:规划空间表达具有一致性、规范性和简单性,很容易实现。在表示复杂形状的障碍物时避免了复杂的计算,易于建模、存储和更新,易扩展到三维。
栅格法的缺点:由于没有考虑环境本身的分布特点,搜索本身具有盲目性,依赖于对精度的要求。当环境复杂时,搜索空间会相当大,算法的效率就会相当低,尤其是当要维护一个较大的地图或维度较高时,降低了路径规划的实时性。
答题解析:无 -
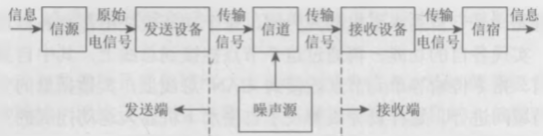
通信系统中信号调制的定义是什么?按被调信号的种类,调制可分为哪几类?三种最基本的调制方法是什么?并画出通信系统的基本模型框图。正确答案:
信号调制是使一种波形的某些特性按另一种波形或信号而变化的过程或处理方法。在无线电通信中,利用电磁波作为信息的载体。信息一般是待传输的基带信号(即调制信号),其特点是频率较低、频带较宽且相互重叠,为了适合单一信道传输,必须进行调制。调制就是将待传输的基带信号(调制信号)加载到高频振荡信号上的过程,其实质是将基带信号搬移到高频载波上,也就是频谱搬移的过程,目的是把要传输的模拟信号或数字信号变换成适合信道传输的高频信号。
按被调信号的种类,调制可分为脉冲调制、正弦波调制和强度调制(如对非相干光调制)等
通常有三种最基本的调制方法:ASK、FSK和PSK。
通信系统的基本模型框图:
 答题解析:
答题解析:无
-
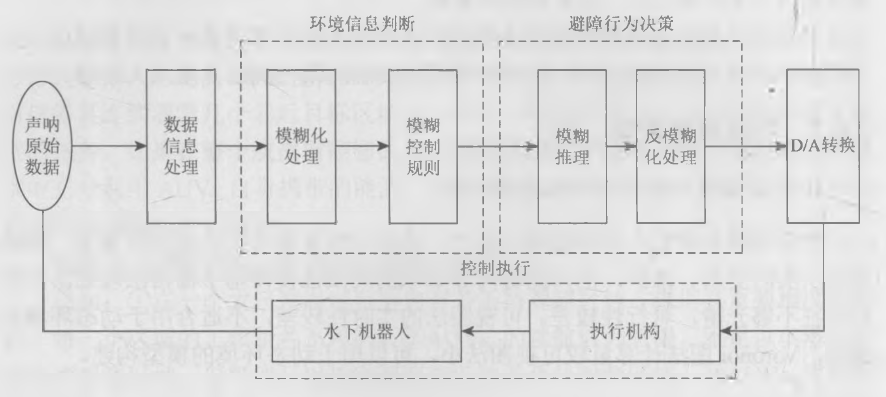
模糊控制方法的一般步骤有哪些?请画出模糊控制器设计流程图。正确答案:
①选取合适的语言变量,进行数据信息处理,包括模数(A/D)转换将精确输入量模糊化;
②构造模糊控制规则表,确定输出量对应的模糊关系;
③依据某一准则进行模糊判决,将输出的控制量反模糊化处理后进行数模(D/A)转换,作用于被控对象。
 答题解析:无
答题解析:无 -
水下机器人设计过程中常用的设计方法有哪些?通常而言,水下机器人的设计任务书一般包括哪些内容?正确答案:
水下机器人设计过程中常用的设计方法主要包括:1.母型设计法;2.逐渐近似法;3.方案法;4.多学科优化设计法
水下机器人的设计任务书一般包括:
(1)任务、规定用途和功能;
(2)主要技术性能指标,包括最大下潜深度和工作深度、航速、航程(续航 时间)、排水量和主尺度(一般给出控制数值)等,也称战技指标。
(3)主要设备、装置和系统配置,有时用户会规定一些设备的型号和技术 要求。
(4)使用要求,包括观察能力、探测能力、作业能力、水下抗流能力等。
(5)使用条件,包括环境条件和后勤保障条件,环境条件包括海区、海况等, 后勤保障条件包括母船、收放方式、运输、运载以及存储方式。
答题解析:无
-